Tryst 2018 IIT Delhi
Autonomous Robotics Workshop
Let the undisciplined thinking of Robot get replaced by awareness. Let them work as we want.
We have come up with the Autonomous Robotics Workshop based on AVR Micro-Controllers.
For Assistance Call
Vivek Kumar Singh +91-8744059520Meghanad +91-8744059531 Shivani Singh +91-7065535500
Ratika +91-9990203445






Course Description
OVERVIEW
This workshop mainly focuses on the students eager to learn Robotics from Basic. They will get the chance to expand their knowledge in the field of designing, construction, operation, and application of Robot with real time hand on practical experience.
The duration of this workshop will be 1 day , with 3 Sessions , 3 hours each, properly divided into theory and hand on practical sessions.
Best Suited for : All B.Tech/B.E./BCA/BSc. Students
Certificate by RoboTryst 2018 in Association With Tryst 2018 IIT Delhi
Day 1 (Session 1)
Introduction to Basics of Robotics
- Basic Electronic Components
- Fundamental Electrical Concepts
- Sensors
- Operational Amplifier
- Integrating Circuit
- Interfacing of Sensors
- Motors and Controlling Circuit
- Interfacing of Motors
Day 1 (Session 2)
Introduction to Microcontrollers
This session would deal with the basics of Microcontroller. The focus will be on the AVR series micro controller- ATMega8, which is one of the most powerful and widely used 8 bit micro controller.
- What is Microcontroller?
- Difference between Microcontroller and Microprocessor.
- Microcontroller Architecture and Interfacing.
- How can we use Microcontroller in our Own Circuits?
Introduction to Programming Languages
- Programming Languages- Assembly vs Embedded C.
- Microcontroller Programming using 'Embedded C'.
Discussion on Different Algorithms
- Line Following Robot Algorithms
- Edge Avoiding Robot Algorithm
- Obstacle Avoider Robot Algorithm
- Wall Following Robot Algorithm
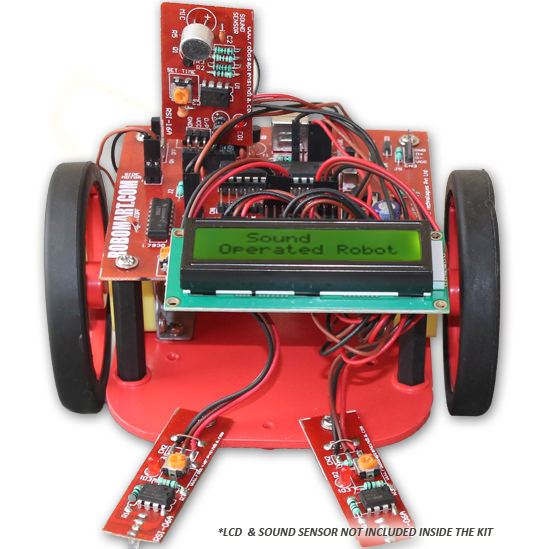
- Sound Operated Robot Algorithm
- Light Searching Robot Algorithm
Installation of Software and Debugging
- Writing your First 'Embedded C' Program in AVR Studio.
- Program Compilation and Debugging.
- Loading Compiled 'C' Program into Microcontroller using Robosapiens 'AVR BOOTFlasher v1.0 Beta'
Day 1 (Session 3)
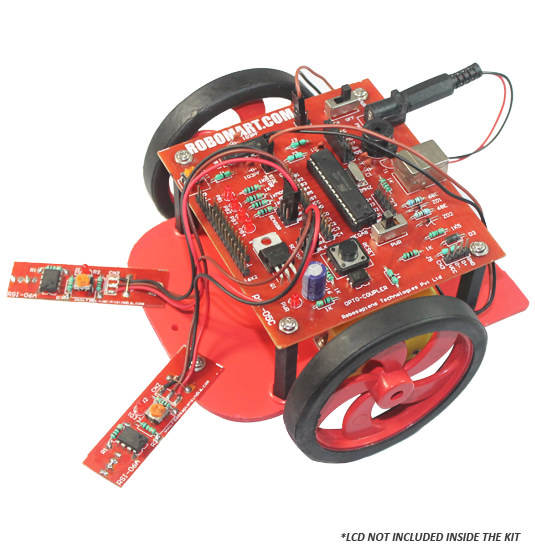
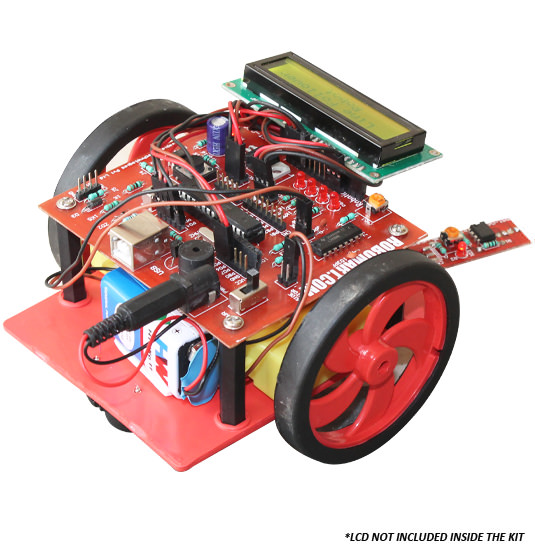
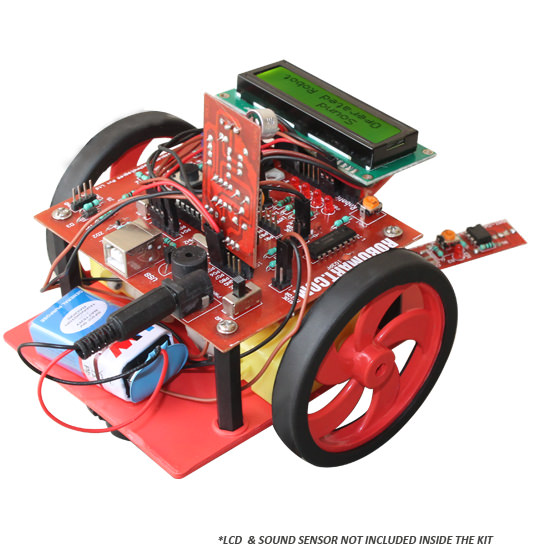
Assembling the DIY kit of Robosapiens iBOT Mini V3.0
Assembling plays a major role that deals with the mechanical section of Robotics including mounting of components and mechanical stability.
Generating different LED Patterns using Robosapiens iBOT Mini V3.0
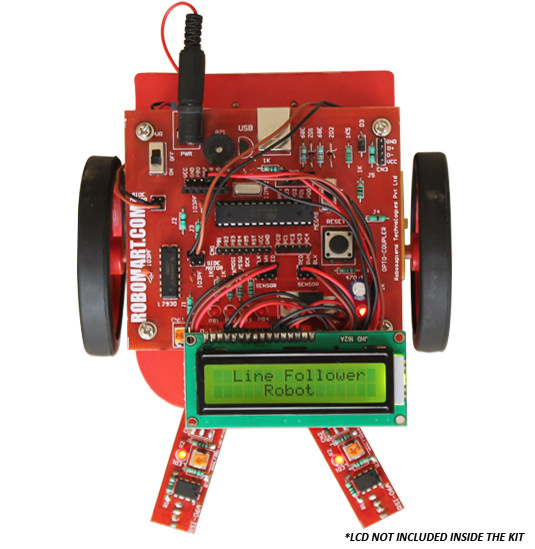
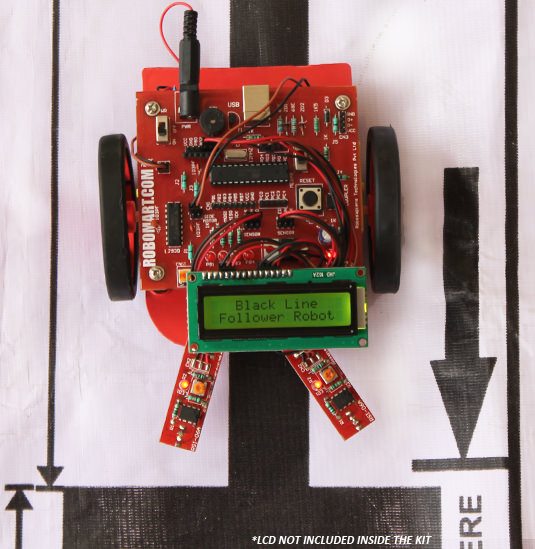
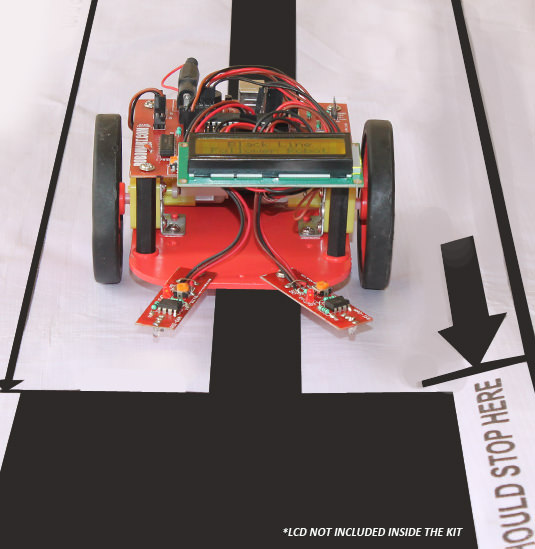
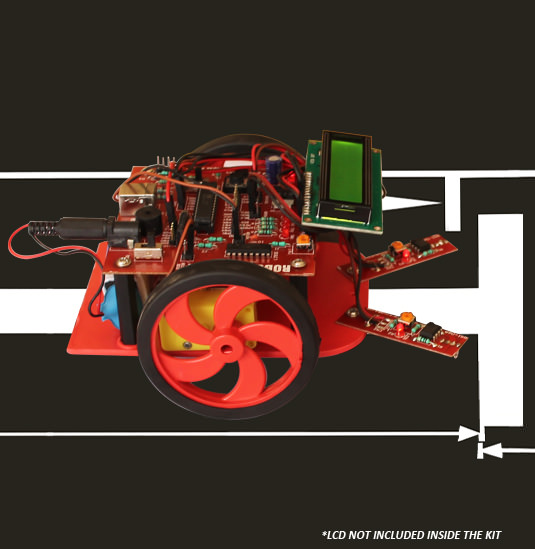
Development of Line Following Robot using Robosapiens iBOT Mini V3.0
As the name suggests, Line Follower Robot is well programmed mobile machine that can follow a path visible like Black Line on White Surface or vice versa. A simple fuzzy logic will do the job of maneuvering the robot according to the Line Following Algorithm discussed in session 2.
Development of Edge Avoiding Robot using Robosapiens iBOT Mini V3.0
Edge Avoiding Robot is a mobile machine that senses the presence & absence of surface below it and avoids the absence of the surface using the Edge Avoiding Algorithm discussed in session 2.
Project to be Covered
- Black Line Follower
- White Line Follower
- Intelligent Line Follower
- Edge Avoider Robot
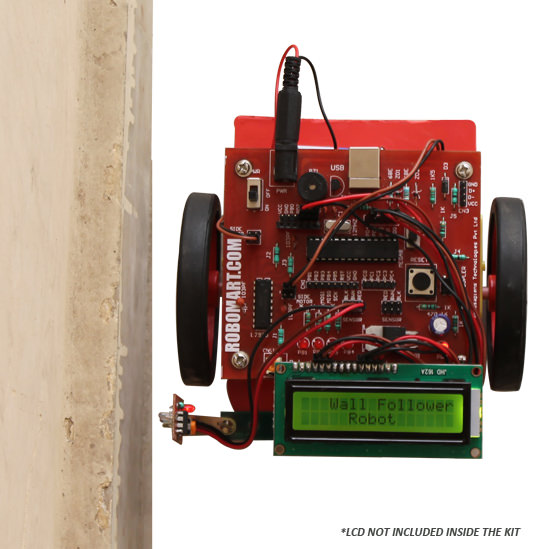
- Wall Follower Robot
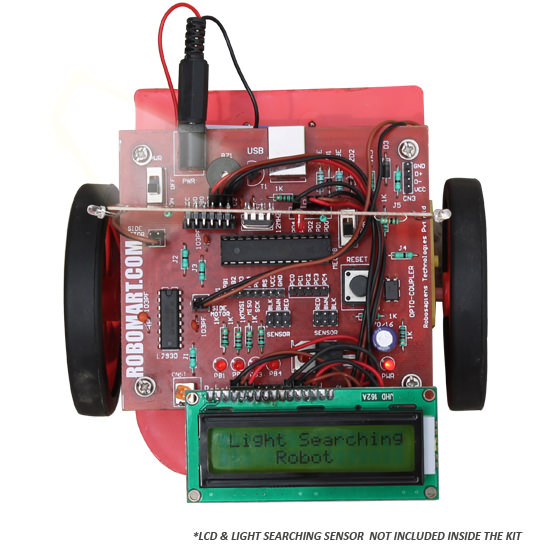
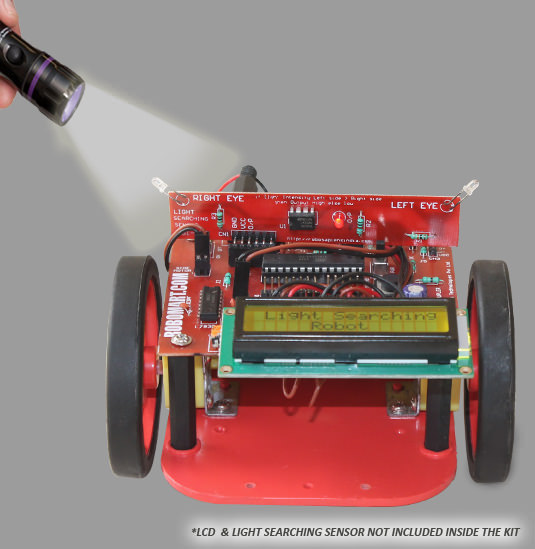
- Light Searching Robot (Optional)
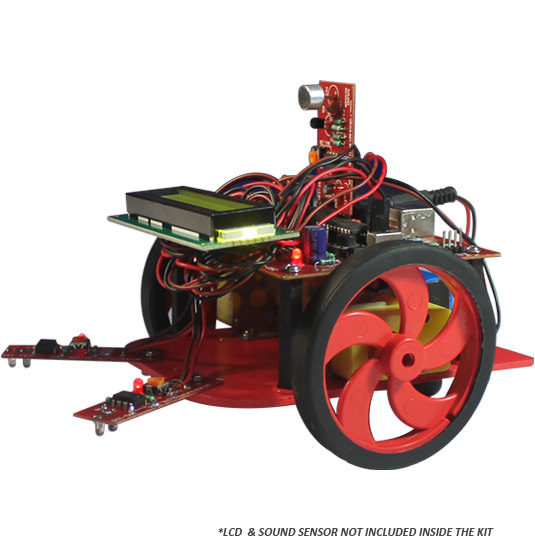
- Sound Operated Robot (Optional)























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


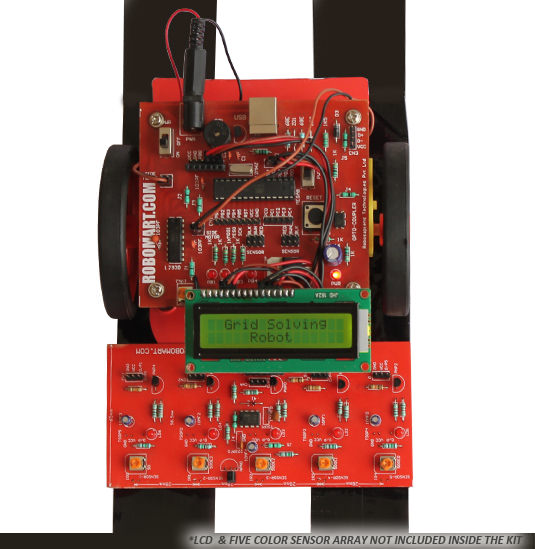
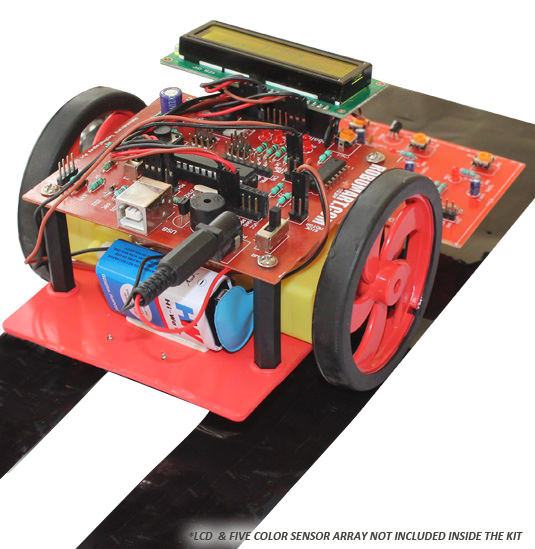
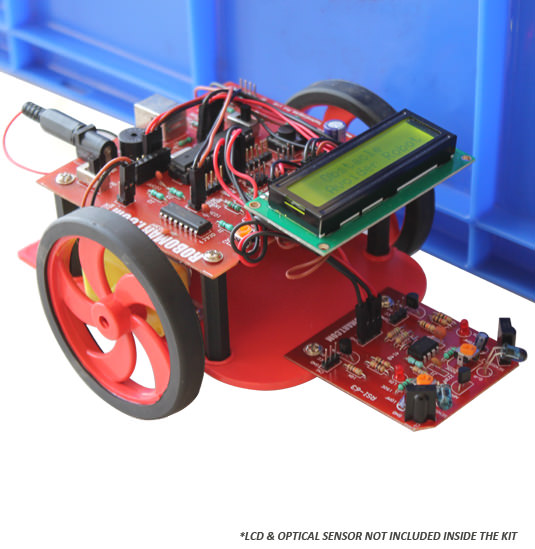
1x (Robosapiens Atmega8 mini Robotics Development Board V4.0)
- Programming via boot loading through USB Port or 6-Pin ISP (In System Programming) cable.
- Driver Software not required (Plug & Play device).
- Three ports available for user interface: PORTB-8 Pin, PORTC-7 Pin, PORTD-8 Pin
- External Reset Switch
- On board crystal oscillator of 12 MHz frequency.
- On board LCD interface port.
- HXD® BUZZER for audible interaction with the users.
- Dedicated DTMF decoder IC module plug-in slot.
- Two supply inputs: One through battery and Second through Adapter.
- On board 5 volt regulated power supply for the board and external peripherals.
- Two H-Bridge implemented on the board using L293D IC to drive two DC motor with 1A drive current at voltages 4.5 to 36 volt.
1x (ATmega8 with inbuilt Robosapiens Bootloader)
1x (USB Connector cable)
1x (High Quality Plastic Chassis Board)
1x (Screw driver)
1x (Ball Caster wheel)
2x (IR Based Digital Sensors)
4x (Support Studs)
1 Pair wheel 76mm Diameter
1 Pair D.C Plastic gear motors
Software/Toolkits/Study Materials will be provided in ZIP Format before coming to workshop Class Room
Book
Other required Tools and accessories etc.
Overview
OVERVIEW
This workshop mainly focuses on the students eager to learn Robotics from Basic. They will get the chance to expand their knowledge in the field of designing, construction, operation, and application of Robot with real time hand on practical experience.
The duration of this workshop will be 1 day , with 3 Sessions , 3 hours each, properly divided into theory and hand on practical sessions.
Best Suited for : All B.Tech/B.E./BCA/BSc. Students
Certificate by RoboTryst 2018 in Association With Tryst 2018 IIT Delhi
Course
Day 1 (Session 1)
Introduction to Basics of Robotics
- Basic Electronic Components
- Fundamental Electrical Concepts
- Sensors
- Operational Amplifier
- Integrating Circuit
- Interfacing of Sensors
- Motors and Controlling Circuit
- Interfacing of Motors
Day 1 (Session 2)
Introduction to Microcontrollers
This session would deal with the basics of Microcontroller. The focus will be on the AVR series micro controller- ATMega8, which is one of the most powerful and widely used 8 bit micro controller.
- What is Microcontroller?
- Difference between Microcontroller and Microprocessor.
- Microcontroller Architecture and Interfacing.
- How can we use Microcontroller in our Own Circuits?
Introduction to Programming Languages
- Programming Languages- Assembly vs Embedded C.
- Microcontroller Programming using 'Embedded C'.
Discussion on Different Algorithms
- Line Following Robot Algorithms
- Edge Avoiding Robot Algorithm
- Obstacle Avoider Robot Algorithm
- Wall Following Robot Algorithm
- Sound Operated Robot Algorithm
- Light Searching Robot Algorithm
Installation of Software and Debugging
- Writing your First 'Embedded C' Program in AVR Studio.
- Program Compilation and Debugging.
- Loading Compiled 'C' Program into Microcontroller using Robosapiens 'AVR BOOTFlasher v1.0 Beta'
Day 1 (Session 3)
Assembling the DIY kit of Robosapiens iBOT Mini V3.0
Assembling plays a major role that deals with the mechanical section of Robotics including mounting of components and mechanical stability.
Generating different LED Patterns using Robosapiens iBOT Mini V3.0
Development of Line Following Robot using Robosapiens iBOT Mini V3.0
As the name suggests, Line Follower Robot is well programmed mobile machine that can follow a path visible like Black Line on White Surface or vice versa. A simple fuzzy logic will do the job of maneuvering the robot according to the Line Following Algorithm discussed in session 2.
Development of Edge Avoiding Robot using Robosapiens iBOT Mini V3.0
Edge Avoiding Robot is a mobile machine that senses the presence & absence of surface below it and avoids the absence of the surface using the Edge Avoiding Algorithm discussed in session 2.
Project
Project to be Covered
- Black Line Follower
- White Line Follower
- Intelligent Line Follower
- Edge Avoider Robot
- Wall Follower Robot
- Light Searching Robot (Optional)
- Sound Operated Robot (Optional)
Kit
1x (Robosapiens Atmega8 mini Robotics Development Board V4.0)
- Programming via boot loading through USB Port or 6-Pin ISP (In System Programming) cable.
- Driver Software not required (Plug & Play device).
- Three ports available for user interface: PORTB-8 Pin, PORTC-7 Pin, PORTD-8 Pin
- External Reset Switch
- On board crystal oscillator of 12 MHz frequency.
- On board LCD interface port.
- HXD® BUZZER for audible interaction with the users.
- Dedicated DTMF decoder IC module plug-in slot.
- Two supply inputs: One through battery and Second through Adapter.
- On board 5 volt regulated power supply for the board and external peripherals.
- Two H-Bridge implemented on the board using L293D IC to drive two DC motor with 1A drive current at voltages 4.5 to 36 volt.
1x (ATmega8 with inbuilt Robosapiens Bootloader)
1x (USB Connector cable)
1x (High Quality Plastic Chassis Board)
1x (Screw driver)
1x (Ball Caster wheel)
2x (IR Based Digital Sensors)
4x (Support Studs)
1 Pair wheel 76mm Diameter
1 Pair D.C Plastic gear motors
Software/Toolkits/Study Materials will be provided in ZIP Format before coming to workshop Class Room
Book
Other required Tools and accessories etc.
Photo Gallery